Разработка системы векторного управления в среде MexBIOS Development Studio
1Солодкий Е. М.,1Терёхин А.А., 1Юсупов И.Р.
1ГОУ ВО «Пермский национальный исследовательский политехнический университет», Пермь, Россия (614000, Пермь, Комсомольский пр. 29), e-mail: wsdl00@gmail.com
Рассматривается пример проектирования и разработки датчиковой системы векторного управления с регуляторами скорости и тока для электромеханической системы управления с асинхронным двигателем, который предназначен для лабораторных и практических занятий. Рассмотрена структура векторной системы управления асинхронным двигателем с ориентацией по вектору потокосцепления ротора. Уделяется особое внимание возможности использования учебных стендов на базе современных схемотехнических решений в образовательных целях и объединения программной и аппаратной частей в виде отдельных узловых блоков в среде визуального программирования MexBIOS Development Studio. Наглядность восприятия обеспечивается единообразной структурой векторной системы управления и простотой реализации алгоритмов. В статье предложены способы и модели, позволяющие перед непосредственной реализацией на микропроцессоре проводить отладку проектируемых систем управления.
Ключевые слова: процессор цифровой обработки сигналов, асинхронный двигатель, наблюдатель угла, вычислитель потокосцепления ротора, система визуального программирования.
Учебные стенды и визуальная среда разработки и моделирования MexBIOS позволяет проектировщикам устройств абстрагироваться от программирования микроконтроллеров и сосредоточиться на оптимальной реализации задач управления. MexBIOS позволяет выполнять практически полный цикл проектирования встроенного программного обеспечения микроконтроллеров: от предварительного моделирования разрабатываемой системы и пробных запусков на макетах, и до работ по сопровождению производства, внесению изменений в выпускаемую продукцию. Основная область применения разработанного продукта – системы управления электродвигателями и устройствами автоматизации, однако примененный подход универсален и для других направлений. Учебные стенды могут быть использованы при обучении бакалавров, магистров, на курсах повышения квалификации по электротехническим направлениям и специальностям, в первую очередь «Электротехника, электромеханика, электротехнологии», «Электропривод и автоматика промышленных установок и технологических комплексов» и др., а так же для научных исследований в ходе аспирантской подготовки.
В данной работе рассматривается пример проектирования и реализации датчиковой системы векторного управления с синтезом регуляторов скорости и тока для асинхронного двигателя, который может быть использован в лабораторных и практических занятиях. Работа студентов со стендами и учебными комплектами предполагает изучение современных схемотехнических решений для задач проектирования систем управления асинхронным двигателем (векторное управление и прямое управление моментом). Следующий шаг в обучении это непосредственная реализация алгоритмов управления. Задача построения полноценной векторной системы управления сложна и при использовании языков высокого уровня, таких как С++, предполагает длительный процесс программирования и отладки. На языке визуального проектирования MexBIOS Development Studio схема управления наглядна и проста для понимания. Ознакомившись же с реально работающий системой управления АД, студент получает практическое задания по адаптации регуляторов исходя из параметров схемы замещения АД, которые будут ему выданы. Работа студента предполагает знание основных шаблонов, таких как: координатные преобразования, блок векторного ШИМ, блок оценки потокосцепления ротора, опрос и обработка сигналов с АЦП. Дальнейшая практическая задача, которая ставится перед студентом, непосредственный синтез регуляторов, снятие переходных процессов и оценка качества.
Учебный стенд, представленный в данной работе, имеет в своем составе два комплекта процессорных модулей и агрегат из двух двигателей объеденных валами через муфту с тензометрическим датчиком момента. Двигатели постоянного тока укомплектованы датчиком скорости – энкодером.
Наличие двух спаренных двигателей разного типа позволяет расширить возможности стенда, в плане: обучение программированию встроенных систем, в том числе в среде разработки MexBIOS Development Studio, создание алгоритмов и схем управления двумя типами двигателей на одном стенде, исследование статических и динамических режимов работы, исследование и настройка работы электроприводов под нагрузкой. Интерфейсный модуль стенда может быть снабжен процессорами цифровой обработки сигналов (ПЦОС) TMS320F2812 или TMS320F2335.
MexBIOS Development Studio – визуальная среда разработки и моделирования встроенного программного обеспечения систем управления электродвигателями. Используя блоки из палитры компонентов, собирается программа управления электродвигателем. Блоки представляют собой законченные функции управления электродвигателем.
Основные блоки при реализации векторной системы:
– Clark - Блок координатного преобразования из трехфазной симметричной системы координат в двухфазную симметричную систему координат
– Park - Блок координатного преобразования из двухфазной неподвижной системы координат в двухфазную вращающуюся систему координат
– Svgendq - генератор пространственного вектора ШИМ. Блок предназначен для формирования соответствующей длительности включения ключей инвертора, необходимой для создания формы напряжения статора с помощью ШИМ. Форма напряжения статора представляется в неподвижной двухфазной системе координат
– ADC - Драйвер АЦП, для конфигурирования и опроса АЦП микроконтроллера.
Для того чтобы сократить затраты вычислительной мощности процессора при работе с числами, чип работает с числами без плавающей запятой. В микроконтроллерах арифметические операции проводятся с применением фиксированной запятой. Дробные числа преобразуются в целые числами. При этом под представление дробной и целой части числа выделяется различное количество бит слова контроллера. Чип работает с типами данных такие как: IQ1- IQ24, где число стоящие после IQ – количество бит выделенных для представления дробной части. При работе с моделью двигателя, не записывая программу в память процессора, используются так же форматы integer и float.
Векторная система управления состоит из трех контуров: контур тока, контур скорости, и контур потокосцепления. Частота вызова основных блоков составляет 20кГц. Блок контура тока и контур потокосцепления работают с частотой 10кГц, а контур скорости с частотой 5кГц.
В MexBiose Development Studio была разработана структурная общая для систем векторного управления (Рис. 4). В данной реализации системы векторного управления реализован автоматический расчет регуляторов тока и скорости по параметрам схемы замещения АД (рис. 3).

Рис. 3. Структурную схему векторного управления
Контур тока является внутренним контуром. Для асинхронного двигателя необходимо два регулятора тока для управления двумя составляющими вектора тока. Составляющая Id – формирует магнитный поток асинхронной машины, необходимый для формирования момента. Составляющая Iq – формирует момент асинхронной машины.
Объединив d-q составляющие тока, уравнения равновесия для АД могут быть записаны в векторной форме (1, 2)
 (1)
(1)
 (2)
(2)
Для реализации наблюдателя потокосцепления, с использованием вектора тока ![]() (в проекциях оси координат d-q) и электрической угловой скорость ротора
(в проекциях оси координат d-q) и электрической угловой скорость ротора ![]() в качестве входных сигналов, используем уравнение (1). Выполнив разложение уравнения (1) на реальную и мнимую части и предполагая, что
в качестве входных сигналов, используем уравнение (1). Выполнив разложение уравнения (1) на реальную и мнимую части и предполагая, что ![]() (требуемая ориентация d-q системы координат), уравнение (2) можно записать следующим образом:
(требуемая ориентация d-q системы координат), уравнение (2) можно записать следующим образом:
 (3)
(3)
![]() (4)
(4)
Переписав уравнение (3) в интегральной форме, выходные оценки наблюдателя потока (амплитуда, скорость и положение вектора потокосцепления ![]() ) можно выразить следующим образом:
) можно выразить следующим образом:
 (5)
(5)
 (6)
(6)
 (7)
(7)
Таким образом, полная оценка вектора потокосцепления может быть получена с помощью форму (5-7). На практике при моделировании подобные оценки показали плохие результаты, поскольку при реализации используются токи, полученные из координатных преобразований с использованием угла, который сам участвует преобразованиях. Таким образом, накапливается ошибка вычисления. В бездатчиковой системе управления это особенно критично.
Предлагается оценку скорости выполнить несколько иначе, используя следующее приближение:
 (9)
(9)
Из формулы (2), раскладывая вектора на плоскость, с учетом приближение (9), имеем:
 (10)
(10)
 (11)
(11)
где ![]() ,
, ![]() ток в осях координат
ток в осях координат ![]() -
- ![]() .
.
В результате практической реализации рассмотренных способов оценки потокосцепления ротора наиболее точные результаты были получены при использовании выражений (5), (10), (7), которые исключают накопление статической ошибки.
В MexBIOS Development Studio был разработан наблюдатель угла потокосцепления ротора по рассмотренной методике, который был успешно проверен на имитационных моделях и стенде.
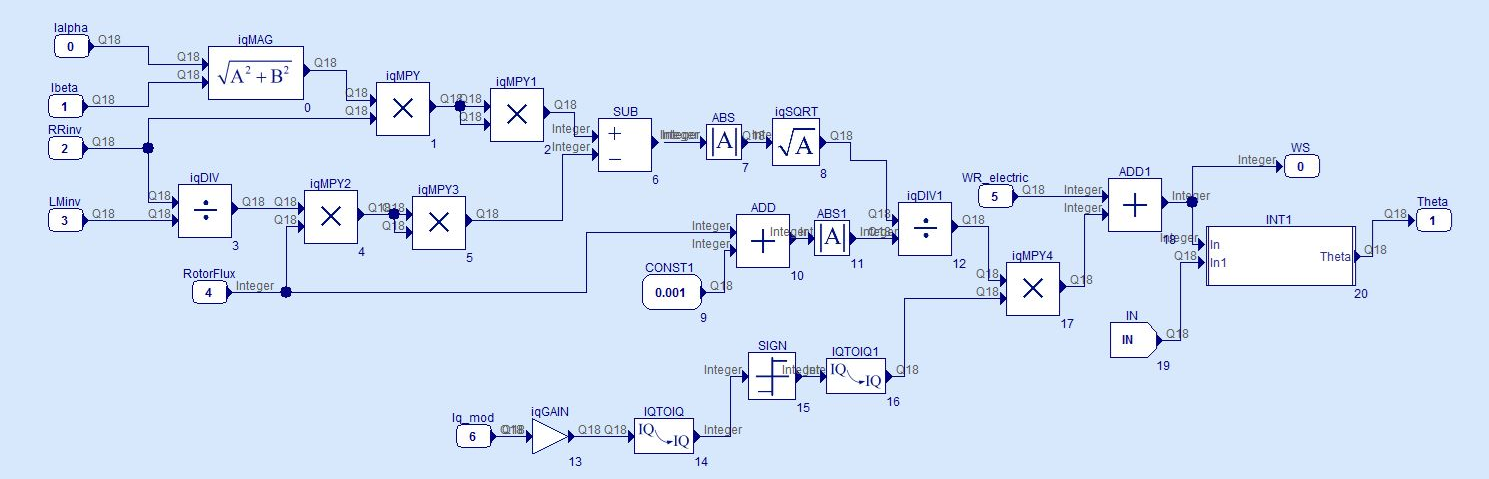
Рис. 4. Реализация наблюдателя угла в среде MexBIOS
Графики переходного процесса по скорости, токам в осях ![]() -
- ![]() , углу и моменту, полученные по результатам имитационного моделирования, приведены на рисунке 5. При снятии характеристик на 0.3 секунде была добавлена статическая нагрузка 10 Н м.
, углу и моменту, полученные по результатам имитационного моделирования, приведены на рисунке 5. При снятии характеристик на 0.3 секунде была добавлена статическая нагрузка 10 Н м.


Рис. 5. Графики переходных процессов.
а – скорости, б – токов в осях ![]() -
- ![]() , в – угла
, в – угла ![]() , г – момента двигателя.
, г – момента двигателя.
В работе был рассмотрен пример проектирования и реализации датчиковой системы векторного управления с синтезом регуляторов скорости и тока для асинхронного двигателя, который может быть использован в лабораторных и практических занятиях. Разработана структурная схема в среде визуального программирования MexBIOS Development Studio, которая может быть предложена студентам для дальнейшей доработки по вариативному заданию в лабораторных и практических занятиях. С использованием MexBIOS Development Studio достигается наглядность полученных результатов за счет визуальных средств и вывода информации на виртуальные приборы
Список литературы
1. Анучин А. С. Системы управления электроприводов / Учебник для вузов. М.: Изд-во «Издательский дом МЭИ», 2015. – 320с.
2. Костыгов А.М., Зюзев А.М., Солодкий Е.М., Кухарчук А.В., Мудров М.В., Нестеров К.Е. Состояние и перспективы использования аппаратно-программных симуляторов электротехнических комплексов / Электротехника. – 2015. - № 6. – С. 8-12.
3. Даденков Д.А., Солодкий Е.М., Шачков А.М. Моделирование системы векторного управления асинхронным двигателем в пакете Matlab/Simulink // Вестник Пермского национального исследовательского политехнического университета. Электротехника, информационные технологии, системы управления. – 2014. - № 3 (11). – С. 117-128.
4. Калачёв Ю.Н. Наблюдатели состояния в векторном электроприводе. [Электронныйресурс].http://elprivod.nmu.org.ua/files/automaticED/kalachev_yu_n_nablyudateli_... (дата обращения: 10.02.2016).
5. Костыгов А.М., Даденков Д.А., Солодкий Е.М., Шачков А.М. Бездатчиковое векторное управление вентильным двигателем с коррекцией ошибки вычисления электрического угла // Информационно-измерительные и управляющие системы. – 2015. - № 13-9. – С. 27-33.
6. Костыгов А.М., Солодкий Е.М., Даденков Д.А. Синтез регуляторов тока и скорости в системе векторного управления вентильным электроприводом // Фундаментальные исследования. – 2014. - № 11-7. – С. 656-661.
7. MexBIOS Development Studio – визуальная среда разработки и моделирования.[Электронный ресурс]. http://mechatronica-pro.com/ru/catalog/software/ (дата обращения: 15.02.2016).
References
1. Anuchin A.S. Sistemy upravlenija jelektroprivodov [Control systemof electric drives]. Uchebnik dlja vuzov. Moskow, Izd-vo «Izdatel'skijdomMJeI», 2015. 320p
2. Kostygov A.M., Solodkii E.M., Kukhatchuk A.V., Zyuzev A.M., Mudrov M.V., Nesteriv K.E. Electrotechnic. 2015, no 3, pp. 8-12.
3. Dadenkov D.A., Solodkij E.M., Shachkov A.M. Vestnik Permskogo nacional'nogo issledovatel'skogo politehnicheskogo universiteta. Elektrotehnika, informacionnye tehnologii, sistemy upravlenija. 2014, no 3 (11), pp. 117-128.
4. Kachachev Iu. N. Nabljudateli sostojanija v vektornom jelektroprivode [state estimator of vector electric drive.] Available at: http://elprivod.nmu.org.ua/files/automaticED/kalachev_yu_n_ nablyudateli_sostoyaniya_v_vektornom_elektropr.pdf (accessed 10 February 2016).
5. Kostygov A.M., Dadenkov D.A., Solodkiy E.M., Shachkov A.M.. Information-measuring and Control Systems. 2015, № 13(9), pp. 27-33.
6. Kostygov A.M., Solodkij E.M., Dadenkov D.A. Fundamental'nyeissledovanija, 2014. no 11 (7), pp. 656-661.
7. MexBIOS Development Studio – vizual'naja sreda razrabotkii modelirovanija. [MexBIOS Development Studio is visual development and simulation environment]. Available at: http://mechatronica-pro.com/ru/catalog/software/ (accessed 15 February 2016).